Облет Луны на Союзе. Проект РКК Энергия
Итак, в этой статье я хотел бы поделиться с вами КРАЙНЕ ценными документами с помощью которых вы сможете оценить возможности нашей космонавтики. В частности — элементной базы и величайших инженеров которые трудятся на благо отрасли. Поехали!
- Пилотируемый облет Луны является начальным этапом Лунной программы. Поэтому основной задачей пилотируемого облета Луны является отработка новых технологий, схем полета, а также лунного орбитального корабля. Кроме того, максимально используя предыдущий опыт и задел по лунному орбитальному кораблю, необходимо закрепить лидерство России в предоставлении транспортных пилотируемых космических кораблей различного назначения.
Разработка материалов технического предложения базируется на следующих исходных положениях:
Техника для совершения облета Луны создается на базе существующих технологий с минимальными доработками.
Для решения задачи пилотируемого облета Луны выбрана двухпусковая схема полета со сборкой лунного экспедиционного комплекса на околоземной орбите. Такая схема полета позволит осуществить облет Луны с использованием существующих носителей, без каких либо доработок. Рассчитывается два варианта схемы:
- со стыковкой пилотируемого корабля к РС МКС и последующей сборкой лунного экспедиционного комплекса на рабочей орбите (Нп = 365, На = 400 км, i = 51.60), см. рисунок 1.2.;
- без стыковки пилотируемого корабля к РС МКС, со сборкой лунного экспедиционного комплекса на низкой орбите (Нкр = 200 км, I = 51.60), см. рисунок 1.3.
Схемы облета по первому варианту позволяет кроме облета Луны совершить смену экипажа МКС, используя один корабль. Однако Схемы облета по второму варианту имеет меньшую продолжительность, содержит меньше этапов и требует меньших затрат топлива.
Лунный экспедиционный комплекс (ЛЭК-1) состоит из разгонного блока ДМ-Л и лунного орбитального корабля (ЛОК) «Союз-Л» (см. рисунок 1.1.).
Облет Луны производится на модифицированном пилотируемом корабле «Союз-ТМА», экипаж корабля – 2-3 человека.
Разгонный блок ДМ-Л создается на базе разгонного блока ДМ-03;
В качестве средств выведения выбираются ракеты-носители «Протон-М» и «Союз-ФГ» или «Союз-2». Старт РН «Протон» и «Союз» осуществляется с космодрома Байконур (республика Казахстан).
Поскольку при облете Луны будут проводиться сеансы наблюдения ее поверхности, фотографирование и изучение поверхности Луны с использованием соответствующей научной аппаратуры, то старт ЛЭК должен проводиться с расчетом на то, чтобы облет произошел в новолуние.
Возвращение на Землю происходит со второй космической скоростью, которая гасится путем двойного входа СА в атмосферу. Посадка осуществляется на территории России.



2. Схемы выполнения пилотируемого облета Луны
Обе схемы облета Луны предполагают стыковку лунного орбитального корабля (ЛОК) с разгонным блоком (РБ) на орбите ИСЗ, выдачу разгонным блоком основного разгонного импульса для полета к Луне, расстыковку РБ и ЛОК, облет Луны на ЛОК, вход в атмосферу Земли и посадку ЛОК на штатном полигоне. Схемы отличаются наличием промежуточной стыковки ЛОК с МКС (первый вариант предполагает посещение МКС экипажем ЛОК до старта к Луне, в то время как второй вариант не предусматривает полет на МКС).

- выведение ЛОК «Союз-Л» на опорную орбиту.
- сближение и стыковка ЛОК «Союз-Л» с МКС.
- полет ЛЭК в составе МКС.
- расстыковка ЛОК «Союз-Л» с МКС. После расстыковки ЛОК совершает одно-двухсуточный полет по орбите фазирования для обеспечения наиболее оптимальных условий для стыковки с РБ.
- выведение разгонного блока ДМ-Л на опорную орбиту.
- перевод РБ на орбиту стыковки.
- стыковка ЛОК с РБ.
- выполнение двигательной установкой РБ основного разгонного импульса для перехода на траекторию облета Луны.
- расстыковка ЛОК с РБ.
- проведение одной–двух коррекций с помощью двигательной установки ЛОК на подлетной к Луне части траектории.
- облет Луны на расстоянии в минимальной точке 100 км (от 90 до 110 км).
- проведение одной–двух коррекций с помощью двигательной установки ЛОК при возвращении к Земле.
- управляемый спуск в атмосфере Земли с двумя погружениями (аналогично принятому при возвращении космических аппаратов серии «Зонд») с приземлением на штатный полигон.

- выведение ЛОК «Союз-Л» на опорную орбиту.
- перевод ЛОК на монтажную орбиту.
- выведение РБ ДМ-Л на опорную орбиту.
- перевод РБ на орбиту стыковки.
- стыковка ЛОК с РБ.
- далее все операции этой схемы аналогичны варианту 1.

3. Оценки потребных величин характеристических скоростей по этапам полета и баллистическая схема полета.
В таблицах 3.1 и 3.2 приведены оценки потребных величин характеристических скоростей для различных этапов полета. Таблица 1 соответствует облету Луны по первому варианту, таблица 2 – облету Луны по второму варианту.



4. Основные требования к комплексу
К Лунному экспедиционному комплексу выдвигаются следующие основные требования:
Конструкция, системы и агрегаты ЛЭК должны соответствовать ГОСТ В 24159-80 «Аппараты космические пилотируемые. Общие технические требования».
Элементы ЛЭК (ЛОК «Союз-Л» и РБ ДМ-Л) должны обеспечивать величины параметров начальных условий стыковки приведенных в таблице 4.1.

За 300 сек до выдачи импульса разгона к Луне, ЛЭК должен быть ориентирован по трансверсальной составляющей вектора скорости, с точностью ±4 угловые минуты. С момента стыковки до момента ориентации по трансверсальной составляющей вектора скорости ЛЭК на теневой стороне витка ориентирован произвольно, на освещенной стороне ориентация ЛЭК должна обеспечивать максимум освещенности панелей СБ.
С момента окончания выдачи разгонного импульса до расстыковки ориентация ЛЭК произвольная, точность ориентации при расхождении ±50 по каждой оси.
Разгонный блок должен отстыковаться от корабля через 300 сек после момента окончания выдачи разгонного импульса к Луне для обеспечения закрутки на Солнце средствами корабля. За это время будут погашены возмущения вызванные работой маршевого двигателя РБ.
Масса комплекса на этапах полета приведена в таблице 4.2.

Энергобаланс и требования к кораблю
- обеспечивать необходимые коррекции траекторий полета к Луне и возвращения на Землю с использованием системы управления движением и навигации и двигательной установки корабля, в соответствии с таблицами 3.1, 3.2;
- иметь ресурс бортовых систем для обеспечения автономного полета продолжительностью до 9 суток (до 2 суток выведение, сближение и стыковка с разгонным блоком и переход на траекторию полета к Луне, а так же резерв для парирования НШС, 7 суток – полет к Луне, ее облет и возвращение к Земле);
- обеспечивать размещение в составе корабля целевой нагрузки для исследования Луны не менее 100 кг;
- обеспечивать возвращение груза объемом не менее 50 дм3;
- обеспечивать возвращение спускаемого аппарата с экипажем на Землю при входе в атмосферу со второй космической скоростью;
- обеспечивать уровень перегрузок при посадке не выше, чем у корабля «Союз ТМА»;
- обеспечивать уровень безопасности экипажа, не уступающий достигнутому на корабле «Союз ТМА» (0,992);
К ЛОК «Союз-Л» предъявляются следующие основные требования:
- масса корабля при выведении не должна превышать 7220 кг для обеспечения выведения на околоземную орбиту существующей отработанной и сертифицированной ракетой-носителем «Союз-ФГ»;
- бортовые системы ЛОК «Союз-Л» должны быть унифицированы с бортовыми системами модернизированного корабля «Союз ТМА»;
- бортовые системы корабля должны обеспечивать стыковку с разгонным блоком ДМ-Л в автоматическом и ручном режимах;
- бортовые системы корабля должны обеспечивать стыковку с орбитальным комплексом в автоматическом и ручном режимах;
- системы корабля должны обеспечивать спасение экипажа на всех участках полета в составе РН, в том числе и на старте;
- бортовые системы корабля должны быть спроектированы с учетом требования устойчивости к двум отказам: при первом отказе (или ошибке экипажа) обеспечивается выполнение программы полета, при втором отказе обеспечивается спасение экипажа;
- первые два полета будут проходить в беспилотном режиме, поэтому необходимо предусмотреть режим ТОРУ для стыковки корабля с РБ;
- между динамическими операциями корабль должен находиться в режиме ориентации панелей солнечных батарей на Солнце с целью подзаряда химических батарей.
Система управления движением и навигации, помимо выполнения всех функций СУДН корабля «Союз ТМА», должна обеспечивать:
- обмен данными с СУДН разгонного блока (в состыкованном состоянии) по каналу МКО; (см. раздел 10 «Система управления» книги 3 «Разгонный блок ДМ-Л»).
- проведение выставки БИНС на всех этапах полета с использованием звездных датчиков;
- проведение коррекций траектории движения корабля с использованием его КДУ на траектории полета к Луне, во время облета Луны и на траектории возвращения к Земле;
- обеспечение требуемой ориентации корабля для проведения сеансов связи с НКУ и, при необходимости, выдача в радиотехнический комплекс исходных данных для наведения антенн дальней связи на траектории полета к Луне и на траектории возвращения к Земле;
- обеспечение требуемой ориентации корабля для проведения исследований Луны и окололунного пространства; (расчет топлива для вышеперечисленных операций представлен в разделе 3.4. «Автономный полет КА к Луне, облет Луны и возвращение к Земле. Корректирующие маневры» книги 4 «Баллистика, аэродинамика, теплообмен»)
- обеспечение первого входа в атмосферу Земли при возвращении после облета Луны в пределах заданного коридора (0.10, см. раздел 7 «Баллистика входа в атмосферу и посадки» книги 4 «Баллистика, аэродинамика, теплообмен»);
- обеспечение получения вектора состояния в СУДН корабля (наземными или бортовыми средствами) с точностью не худшей, чем вектор состояния, получаемый кораблями «Союз ТМА» (начиная с №703) от СУДН орбитальной станции (точность параметров вектора состояния: СКО σх, σy, σz - 20-25 м, скорость движения Vx, Vy, Vz - 5-7 см/с);
- управление движением СА в процессе первого входа в атмосферу Земли при возвращении из окрестностей Луны с целью обеспечения заданных условий для второго входа в атмосферу.
Комплексная радиотехническая система, помимо выполнения всех функций радиосистем корабля «Союз ТМА», должна обеспечивать:
- связь с расстояния 400000 км при потребляемой электрической мощности ~ 200 Вт;
- обеспечение траекторных измерений на траектории полета к Луне и на траектории возвращения к Земле;
- работу в радиочастотном диапазоне, предусмотренном международными соглашениями для управления космическими аппаратами.
Система обеспечения теплового режима (СОТР) корабля «Союз-Л», должна обеспечивать тепловой режим СА в ходе торможения в атмосфере после входа в нее со второй комической скоростью, последующего выхода из нее, участка полета вне атмосферы, повторного входа и торможения вплоть до посадки на Землю и эвакуации экипажа.
Требования к остальным системам ЛОК соответствуют требованиям предъявляемым к системам ТПК «Союз-ТМА».
- в целях сокращения затрат на отработку и изготовление корабля, обеспечения его высокой надежности требуется обеспечить соответствие корабля существующим головному обтекателю и системе аварийного спасения. Силовая конструкция корпусов отсеков корабля заимствуется с корабля «Союз ТМА» без изменений.
- теплозащита и теплоизоляция СА должны обеспечивать требуемый тепловой режим при возвращении на Землю со второй космической скоростью.
- в БО должен быть установлен иллюминатор Æ426 мм для съемок Луны.
- ремонт конструкции корабля в ходе полета не предусматривается, ВнеКД для обслуживания корабля в ходе полета не планируется.
Разгонный блок ДМ-Л должен соответствовать требованиям ТТЗ № К-694 и дополнений 1 и 2 к ТТЗ.
Разгонный блок ДМ-Л должен быть сертифицирован для использования в пилотируемых программах.
Разгонный блок ДМ-Л должен иметь запас топлива, достаточный для автономного выведения с опорной орбиты на орбиту сборки ЛЭК и разгона ЛЭК к Луне (в варианте стыковки ЛОК к МКС - 16507 кг, в варианте без стыковки 16518 кг).
Разгонный блок ДМ-Л для обеспечения сборки ЛЭК должен быть оснащён пассивным стыковочным узлом, элементами системы прицеливания и системы стыковки пассивной. Система стыковки должна обеспечивать стыковку и расстыковку с ЛОК «Союз-Л», а так же необходимые механические характеристики связки корабля и разгонного блока, в том числе при работе двигателя разгонного блока.
- стабилизацию при стыковке, величины параметров начальных условий стыковки приведены в таблице 4.1;
- обмен командной информацией с кораблем (см. таблицу 4.1);
- за 2 часа до стыковки РБ должен занять требуемую ориентацию.
После отделения от ЛОК разгонный блок должен быть уведён с траектории полёта ЛОК к Луне средствами РБ.
Облик лунного экспедиционного комплекса определяется следующими ограничениями:
- размещением корабля и РБ под головными обтекателями РН 11С517 0000-А3 и 11Ф639.М0000-001 соответственно;
- обеспечение несоударения элементов конструкции ЛОК и РБ при прокачках, возникающих при стыковке;
- нагрузками, воздействующими на элементы ЛЭК.
5.1 Общий вид, система координат и габариты ЛЭК приведены на рисунке 5.1.



Рисунок 5.3. Размещение ДМ-Л под головным обтекателем РН «Протон-М». 5.2 Обеспечение несоударения элементов конструкции ЛОК и РБ при прокачках, возникающих при стыковке, достигается введением в конструкцию разгонного блока удлиняющего конуса, на который устанавливается пассивный стыковочный агрегат системы стыковки и антенны системы взаимных измерений. Величина прокачек определяется характеристиками выбранной системы стыковки. Зона прокачки ЛОК относительно разгонного блока приведен на рисунке 5.4.


Минимальный зазор между элементами конструкции РБ и элементами конструкции корабля при максимальных углах прокачек во время стыковки составляет 81,5 мм.
Наиболее существенными нагрузками, воздействующими на элементы ЛЭК, являются нагрузки, возникающие при осуществлении маневра стыковки ЛОК к РБ, запуске маршевого двигателя РБ, выключении маршевого двигателя РБ (наибольшей величины перегрузки достигают в конце работы двигателя) и расстыковке ЛОК и РБ. Воздействие нагрузок от перемещений экипажа, работы двигателей системы ориентации рассматривается, как незначительное и будет учтено на последующих этапах проекта.
Предварительная оценка нагружения конструкции ЛЭК на участке полета связки по траектории облета Луны показала (см. разделы 5 «Доработки конструкции и теплозащитного покрытия корабля «Союз-ТМА» книги 2 «Лунный орбитальный корабль «Союз-Л» и 17 «Нагружение конструкции» книги 3 «Разгонный блок ДМ-Л»), что уровень нагружений по эквивалентным силам не превышает допустимого.
Положение ЛОК «Союз-Л» в составе ЛЭК таково, что при работе ДУ РБ ДМ-Л перегрузка на экипаж корабля, находящегося в креслах СА, действует в противоположном (отрицательном) направлении от расчетной ( в направлении спина-грудь). Величина перегрузки меняется в зависимости от времени работы ДУ РБ ДМ-Л и, соответственно, массы комплекса от 0,3 до 0,9 g. Общее время работы ДУ РБ составляет порядка 12 минут (см. рис. 5.2. Общий вид ЛЭК-1).
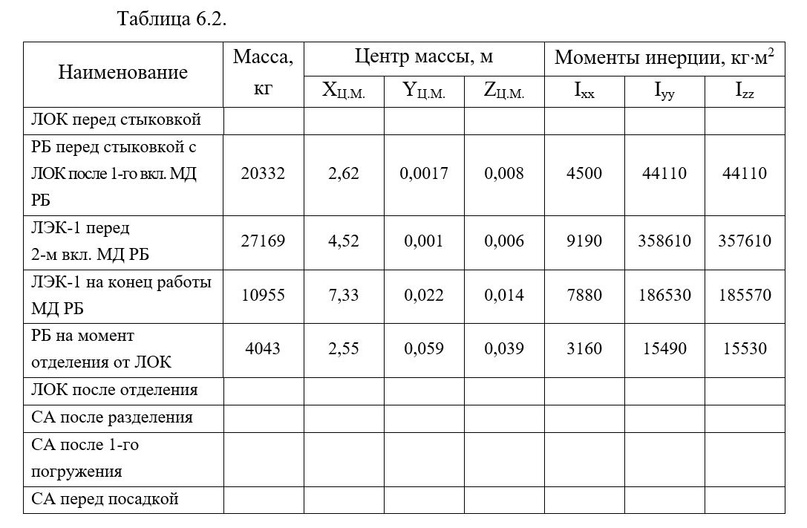
6. Массово-инерционные характеристики ЛЭК
Массовые, центровочные и инерционные характеристики ЛЭК, ЛОК и РБ по этапам полета для старта ЛЭК-1 с высокой (с использованием МКС) и низкой (без использования МКС) орбит сборки приведены соответственно в таблицах 6.1. и 6.2.
Базовая система координат РБ (рис. 5.1.), в которой приведены центровочные характеристики, имеет начало в точке пересечения продольной оси Х с плоскостью стыка нижнего переходника (НП) со средним переходником (СП) и положительные направления осей:
+XРБ - в направлении верхней фермы,
+YРБ - в направлении плоскости III,
+ZРБ - в направлении плоскости IY.
Характеристики рассчитывались при условии, что топливо прижато к нижним днищам баков.

7. Интерфейсы разгонного блока ДМ-Л с кораблем «Союз-Л»
При стыковке ЛОК с РБ ДМ-Л образуются два вида интерфейсов: механический и электрический интерфейсы.
Необходимость в газовом интерфейсе между разгонным блоком и кораблем отсутствует в связи с отсутствием герметичного отсека в составе РБ ДМ-Л. В случае наличия герметического отсека в составе разгонного блока потребуется дополнительно оснастить РБ вентиляцией герметичного отсека и образовать газовый интерфейс.
Гидравлические интерфейсы между разгонным блоком и кораблем «Союз-Л» отсутствуют.
Системы обеспечения теплового режима корабля, и разгонного блока в течение совместного полета работают автономно, в связи с чем необходимость в интерфейсе по теплу отсутствует.
Возможность передачи топлива в РБ на ЛОК и с ЛОК на РБ не предусматривается, т.к. они используют разные компоненты топлива
Механический интерфейс разгонного блока ДМ-Л с кораблем «Союз-Л» представляет собой упрощенную версию пассивного стыковочного агрегата АСП, типа 11Ф732.Г4000-0, используемого в составе МКС, и активный стыковочный агрегат АСА, типа 11Ф732.Г5000-0, входящий в состав корабля «Союз-Л».
Стыковочный агрегат разгонного блока ДМ-Л обеспечивает следующие функции:
- компенсацию угловых и линейных отклонений при стыковке.
- обеспечение механического захвата головки штанги активного стыковочного агрегата (образование первичной механической связи).
- выравнивание взаимной ориентации корабля и разгонного блока в процессе стягивания (стягивание обеспечивается активным агрегатом АСА).
- образование жесткого стыка (вторичная механическая связь, обеспечивается закрытием крюков активного стыковочного агрегата).
- закрытие крюков пассивного стыковочного агрегата.
- обеспечение соединения электроразъемов.
Состав и размещение электроразъемов идентичны АСП типа 11Ф732.Г4000-0.
Отличительные особенности конструкции АСП для разгонного блока ДМ-Л:
- в приводе механизма герметизации стыка устанавливаются два электродвигателя вместо одного, устанавливаемого в настоящее время;
- в случае отсутствия герметичного отсека в составе РБ вместо крышки с герметизирующим уплотнением и приводом открытия/закрытия устанавливается стационарная крышка с гнездом;
- гидроразъемы на АСП не устанавливаются.
Взаимное положение стыковочных агрегатов при стыковке
Параметры взаимного положения агрегатов при стыковке приведены в таблице 7.2. Взаимное положение стыковочных агрегатов при стыковке показано на рисунке 7.2.


Электрический интерфейс разгонного блока ДМ-Л с кораблем «Союз-Л»
- передача прямых проводных команд для управления пассивным стыковочным агрегатом со стороны корабля «Союз-Л»;
- информационный обмен между кораблем и разгонным блоком;
- выдача команды «авария на РБ», с РБ на ЛОК, и команды «аварийное выключение МД» (МД – маршевый двигатель РБ), с ЛОК на РБ.
Реализация вышеперечисленных задач происходит по следующим каналам:
- Прямые проводные команды через электроразъемы стыковочного агрегата для управления пассивным стыковочным агрегатом со стороны корабля «Союз-Л».
- Обмен данными по шине МКО для всех остальных видов информационного обмена между кораблем и разгонным блоком.
Управление пассивным стыковочным агрегатом осуществляется блоком автоматики, входящим в состав системы стыковки разгонного блока ДМ-Л и размещаемым на разгонном блоке.
Состав команд управления пассивным стыковочным агрегатом со стороны корабля «Союз-Л», которые должны передаваться через электроразъемы стыковочного агрегата:
- закрытие крюков пассивного стыковочного агрегата;
- открытие крюков пассивного стыковочного агрегата;
- открытие упоров гнезда пассивного стыковочного агрегата;
В случае выхода из строя БЦВК ДМ-Л на участке выдачи разгонного импульса на корабль должна быть передана команда «авария на РБ», после чего с корабля на РБ должна поступить команда «аварийное выключение МД». Поскольку, в случае выхода из строя БЦВК ДМ-Л, по МКО эти команды не могут быть переданы, то необходимо предусмотреть дискретный канал передачи команд.
Обмен информацией системы управления РБ ДМ-Л с СУДН и СУБК корабля «Союз-Л» должен производиться по МКО (один дублированный канал по ГОСТ 26765.52-87) через существующие цепи в электроразъемах стыковочного агрегата.
Состав информации, передаваемой из СУДН корабля «Союз-Л» в СУ РБ ДМ-Л в совместном полете (подлежит уточнению):
- информация по ориентации корабля (для обеспечения возможности выставки гироплатформы РБ с помощью звездных датчиков корабля в связи с отсутствием оптических датчиков в составе РБ);
- информация о векторе состояния (координаты и скорость в инерциальном пространстве) корабля (для обеспечения возможности корректировки вектора состояния РБ);
- уставки на выдачу разгонного импульса двигательной установкой РБ;
- запрос телеметрической информации о состоянии бортовых систем РБ для ее отображения на пульте космонавтов в корабле;
- команды для управления бортовыми системами РБ (например «аварийное выключение МД);
- запрос статусной информации СУ РБ для ее отображения на пульте космонавтов в корабле.
Состав информации, передаваемой из СУ РБ ДМ-Л в СУДН и СУБК корабля «Союз-Л»:
- информация об ориентации РБ (для контроля величины ошибки ее определения СУ РБ с использованием датчиков СУДН корабля);
- информация о векторе состояния РБ (для контроля величины ошибки его определения СУ РБ с использованием датчиков СУДН корабля, а так же вектора состояния, закладываемого в СУДН корабля с Земли);
- телеметрическая информация о состоянии бортовых систем РБ для ее отображения на пульте космонавтов в корабле;
- статусная информация СУ РБ для ее отображения на пульте космонавтов в корабле.
При полете ЛОК в составе МКС будут обеспечены интерфейсы с модулями РС в соответствии с требованиями SSP 41163 и П 4000-103, т.ХХ, ч.1. Эти интерфейсы состоят из электроэнергии, атмосферы, конструктивных и механических нагрузок, тепловой энергии, команд, данных, включающими аудио- и передаваемую на Землю телеметрическую информацию.
Этот интерфейс позволяет экипажу перемещаться между кораблем и МКС.
При стыковке ЛОК с РБ также образуется электрический интерфейс, реализованный в ШРС, который предназначен для:
- передачи прямых проводных команд для управления пассивным стыковочным агрегатом со стороны корабля «Союз-Л», выдача команды «авария на РБ», с РБ на ЛОК, и команды «аварийное выключение МД», с ЛОК на РБ;
- информационного обмена между ЛОК и РБ;
Передача прямых проводных команд осуществляется через резервные цепи СУБК в ШРС3 и ШРС4, предусматривается резервирование этих цепей через резервные цепи СУБК в ШРС1 и ШРС2.
Информационный обмен между ЛОК и РБ происходит по магистралям МКО, использующим резервные цепи для каналов МКО.
Электрические связи ЛОК «Союз-Л» с РС МКС и РБ ДМ-Л приведены в таблице 8.1.

9. Полетные операции вблизи МКС
В настоящем разделе рассматриваются следующие вопросы:
- Стыковка КК «Союз-Л» с МКС.
- Расстыковка КК «Союз-Л» с МКС.
- Условия, налагаемые на орбиту РБ «ДМ-Л» при стыковке с КК «Союз-Л».
Стыковка КК «Cоюз‑Л» может быть осуществлена на узел СО1, а после ввода модуля МЛМ в состав РС МКС – и на надирный узел МЛМ. По сравнению со случаем стыковки к СО1, кинематические требования к параметрам относительного движения объектов при стыковке к МЛМ ужесточаются. Это сделано для обеспечения приемлемых нагрузок на конструкцию РС и МКС в целом. Для дальнейшей работы предлагается в качестве основного рассматривать случай стыковки к МЛМ. Соответствующие данные приводятся в таблице 9.1.

В любой комбинации значений параметров VX, VYZ, D, wYZ они должны лежать внутри сферы, ограниченной радиусом R = 1 и определяемым как:


Значения остальных параметров могут находиться в любой комбинации в пределах диапазонов, указанных в таблице 1.
Расстыковка
МКС перед отделением КК «Союз-Л» поддерживает режим орбитальной ориентации с точностями по углам ± 3º, по угловой скорости ± 0,02º/с. При этом номинальная угловая скорость в тангаже ~ 0,065º/с.
Выполнение операций по расстыковке производится после перехода МКС в дрейф. Временной интервал между переходом в дрейф и разделением (по сигналу от контактных датчиков) не превышает 6 минут. Далее МКС еще 5 минут находится в дрейфе. После дрейфа СУД МКС парирует накопившуюся угловую скорость и поддерживает текущую ориентацию
МКС получает угловые возмущения под действием гравитационного момента за время свободного дрейфа, а также после срабатывания пружинных толкателей.
Начиная с конфигурации 12А.1, СУД АС перед разделением выводит свои солнечные батареи в положение ± 16º от плоскости XOY АС . В случаях, когда МКС теряет ориентацию и стабилизацию, выведение батарей в установленное положение не производится.
Ограничения на параметры орбиты РБ ДМ-Л
Параметры орбиты, по которой выполняется автономный полет РБ ДМ-Л и его стыковка с КК «Союз-Л» должны обеспечивать непопадание указанных изделий в пределы "ящика опасности" с размерами 25 км вдоль вектора орбитальной скорости и 5 км в поперечных направлениях относительно МКС.
ЛОК в составе МКС должен обеспечивать выполнение всех полетных операций, представленных в требованиях SSP 41163 и в
П 4000-103, т.ХХ, ч.7 для модернизированного ТПК «Союз-ТМА», в том числе:
- ЛОК должен выполнять в течении 200 суток задачу очередного ТПК;
- ЛОК должен обеспечивать аварийное возвращение экипажа на Землю.
На участке совместного полёта ЛОК и МКС должны быть реализованы функции, аналогичные функциям модернизированного ТПК «Союз-ТМА» в соответствии с П 4000-103, т.ХХ, чч.1 и 7:
· формирование аварийно - предупредительной информации и сигнализации о состоянии ЛОК для экипажа МКС;
· передача электроэнергии МКС на ЛОК;
· запрет включения на ЛОК режимов несовместимых с текущим состоянием МКС;
· контроль состояния ЛОК по ТМИ с использованием средств МКС;
· обеспечение СУДН ЛОК из ТВМ СМ данными об ориентации относительно ОСК (по запросу);
· выполнение необходимых операций по отключению бортовых систем (БС) ЛОК (в том числе, системы вентиляции ЛОК) при пожаре, разгерметизации и при переходе РС в режим «Выживания».
Перед выполнением расстыковки ЛОК с МКС необходимо провести проверки бортовых систем ЛОК по готовности их к полету к Луне.
14. Наземный комплекс управления. Управление полетом
НКУ объектами лунного облетного комплекса рассматривается состоящим из четырех неравнозначных по степени готовности составляющих:
- комплекс наземных радиотехнических средств на станциях слежения, предназначенных для обеспечения полетных операций при выведении и работ на ОИСЗ, включая старт ЛЭК-1 на орбиту облета Луны (далее условно обозначается как НКУ-1);
- комплекс наземных радиотехнических средств на станциях слежения, предназначенных для обеспечения полетных операций корабля «Союз-Л» на трассе облета Луны и при возвращении на Землю (далее условно обозначается как НКУ-2);
- система сбора и передачи данных (ССПД) для обмена информацией между станциями слежения НКУ и ЦУП;
- центр управления полетом.
Средства НКУ-1 взаимодействуют:
• единая командно-телеметрическая система (ЕКТС), обеспечивающая в S-диапазоне обмен с Землей всеми видами информации (ТМК, КПИ, техническое ТВ, ТЛФ, РКО) при работе через остронаправленную и всенаправленную антенны (ОНА и ВНА). ЕКТС может взаимодействовать как с наземными средствами, так и со спутниками-ретрансляторами (СР) спутниковой системы контроля и управления (ССКУ) систем TDRSS, «Артемис», а с 2009 – 2010 г.г., возможно, с отечественной ССКУ на базе СР «Луч-5»;
• система «Рассвет» для обеспечения голосовой связи с экипажем (ТЛФ) в М-диапазоне. Эта же система используется для связи с экипажем из СА корабля на участке приземления после выполнения облета Луны.
- на разгонном блоке 11С861-03 (РБ ДМ-Л) с системой ЕКТС, обеспечивающей передачу с РБ ТМИ, обмен КПИ и РКО при работе через ВНА и малонаправленные антенны (МНА). ЕКТС на РБ может взаимодествовать как со средствами НКУ, так и с ССКУ.
Средства НКУ-2 взаимодействуют:
- с устанавливаемой на корабле «Союз-Л» системой ЕКТС, обеспечивающей в S-диапазоне обмен с Землей всеми видами информации (ТМИ, КПИ, технологическим ТВ, ТЛФ, РКО) при работе через ОНА или ВНА. ЕКТС может взаимодействовать как с наземными средствами НКУ-2, так и с ССКУ.
Кроме перечисленных радиотехнических систем, в спускаемом аппарате (СА) корабля «Союз-Л», для связи на участке приземления после разделения отсеков, кроме связи через систему «Рассвет», рассматривается возможность установки аппаратуры, обеспечивающей обмен информацией с КА через систему спутниковой связи «Инмарсат», а также радиомаяк «Коспас-Сорсат».
Наземный комплекс управления на этапах образования ЛЭК-1 на ОИСЗ и старта к Луне (НКУ-1)
НКУ-1 базируется на существующих станциях НКУ Российского сегмента МКС. Обмен информацией в контуре Земля-борт-Земля производится в НКУ-1 следующим образом.
- прием ТМИ, обмен КПИ, прием технологического ТВ и РКО осуществляется наземными радиотехническими комплексами (НРТК) ЕКТС в составе станций «Клен», располагаемых на трех основных станциях слежения РС МКС: пл. 23 космодрома Байконур, ОКИК-13 (г. Улан-Удэ), ОКИК-15 (г. Уссурийск) и на станции слежения «Медвежьи озера»;
- обмен ТЛФ-информацией с экипажем КА осуществляется через ППС «Аврора-УКВ-Н» на ОКИК-6 (г. Петропавловск-Камчатчский), 13, 14 (г. Щелково), 15, пл. 18 космодрома Байконур и ППК «Гибрид-Н» на ОКИК-13, 14 и пл.18, или через НРТК ЕКТС.
- обмен всеми видами информации (ТМИ, КПИ, РКО) осуществляется через НРТК ЕКТС на тех же станциях слежения, что и для корабля.
Привлекаемые в состав НКУ-1 Российские станции слежения обеспечивают на ОИСЗ связь с КА и РБ на девяти из 16 суточных витков (с 13 по 5 суточные). На семи витках в течение ~10 часов в сутки (с 6 по 12 суточные) связь с КА отсутствует. Для ликвидации зоны отсутствия связи на 6-12 суточных витках и увеличения продолжительности связи на 13-5 суточных витках необходимо рассмотреть использование возможностей БРТК ЕКТС по привлечению к обмену информацией с КА и РБ спутниковой системы контроля и управления ССКУ (TDRSS, «Артемис», с 2009 г. – возможно СР «Луч-5»).
Оборудование станциями «Клен» «Медвежьих озер», пл. 23, ОКИК-13 и ОКИК-15 запланировано в 2008 – 2010 г.г. в рамках развития Роскосмосом гражданской составляющей ГосНАКУ.
На этапах дальнейшего проектирования должен быть проработан вопрос об использовании в составе НКУ-1 для приема ТМИ и обмена КПИ средств НКУ РКК «Энергия»: пунктов контроля и управления (ПКУ) «Наука-254», размещаемого на пл.254 космодрома Байконур и ПКУ «Наука-Э», размещаемого на КИС-416 на территории РКК «Энергия». Эти ПКУ планируется оснастить полноповоротными антеннами диаметром 5-7 м и НРТК ЕКТС. При таком оснащении ПКУ могут быть использованы вместо станций «Клен» на ОКИК-14 и пл. 23 из состава гражданской составляющей ГосНАКУ.
Система сбора и передачи данных (ССПД) для обмена информацией между станциями слежения и ЦУП-М
Обмен всеми видами информации между ОКИК и ЦУП-М может осуществляться с использованием:
- существующей в настоящее время спутниковой системы «Связка», на базе орбитальной группировки СР «Молния-1Т», наземных, периферийных станций «Связник-П» на ОКИК-4, 6, 13, 15, пл.23 и центральных станций «Связник-Ц» на ОКИК-14 и объекте 413, связанных широкополосными каналами связи с ЦУП-М;
- вводимой в строй в 2007 г. (ответственный ЦЭНКИ) системы связи на базе магистральной цифровой волоконно-оптической сети связи «Транстелеком» и «Комкор»;
- вновь создаваемой системы связи (предложение РКК «Энергия») на базе группировки СР «Ямал-200», наземных периферийных станций «Приморка» на ОКИК-13, 15, пл.23 и центральной станции в РКК «Энергия» и в г. Краснознаменск (или ОКИК-14), имеющих связь с ЦУП-М по наземным широкополосным каналам.
Из предлагаемых вариантов систем связи предпочтительными являются два последних. Выбор варианта ССПД подлежит определению при дальнейшем проектировании.
Центр управления полетом
В качестве ЦУПа (при взаимодействии как с НКУ-1, так и с НКУ-2) рассматривается использование существующего Центра управления пилотируемыми полетами в г. Королев М.О. (ЦУП-М).
Привлечение ЦУП-М определяется минимизацией затрат на ЦУП, т.к. этот центр постоянно используется для управления полетом объектов РС МКС (в том числе кораблями «Союз-ТМА», на базе которого создается «Союз-Л»), а также разгонными блоками РБ ДМ-SL по программе «Морской старт».
Для управления полетом корабля «Союз-Л» и РБ ДМ-Л, в процессе образования ЛЭК-1, разгона ЛЭК-1 к Луне и управления кораблем при облете, должны быть выделены отдельные залы управления и помещения групп поддержки из числа существующих в ЦУП-М.
Необходимо будет модернизировать вычислительные средства ЦУПа, средства связи, оборудование залов управления, групп поддержки и разработать (модернизировать) программно-математическое обеспечение (ПМО) всех составляющих:
- ПМО баллистико-навигационного обеспечения (БНО);
- ПМО обработки и анализа телеметрической информации;
- ПМО планирования полета и командно-программного управления (КПУ).
Наибольший объем новых разработок предстоит в ПМО БНО.
Объем модернизации ПМО обработки и анализа ТМИ и ПМО КПУ зависит от сроков реализации облетной программы и сроков модернизации кораблей «Союз-ТМА» (установки БРТК ЕКТС) по программе МКС. При опережающих сроках модернизации кораблей по программе МКС, затраты на модернизацию этих составляющих ПМО для облетной программы могут быть уменьшены.
Схема НКУ-1 на этапах образования ЛЭК-1 и старта к Луне (в варианте ССПД на базе группировки СР «Ямал-200) показана на рис.1.14.1. В случае привлечения к управлению полетом спутниковых систем связи (типа TDRSS) эта схема должна быть дополнена.

Наземный комплекс управления для обеспечения полетных операций корабля «Союз-Л» при облете Луны и при возвращении на Землю (НКУ-2)
Для обеспечения полетных операций на облетной траектории, на дальностях до ~ 400000 км от поверхности Земли, в составе НКУ-2 планируется использовать:
- антенные системы (АС) на ОКИК-15 (Уссурийск) и на ОКИК-13 (Улан-Удэ), созданные в 1966-1970 гг. и в 1967-1970 гг. и использованные в программе «Л1», а также позже при полетах КА к Венере и Марсу;
- антенные системы на станции слежения «Медвежьи озера», созданные в конце 70-х годов и использованные в коммерческих программах и в программах полета КА к Венере, комете Галлея, спутнику Марса Фобос;
- разработанную в 2004-2005 гг. НРТК ЕКТС S-диапазона, сопрягаемую с АС на трех перечисленных выше станциях слежения.
Для использования упомянутых АС в программе облета необходимо проведение ремонтно-восстановительных работ (РВР) на этих АС и их доработки для обеспечения работы в S-диапазоне.
ССПД для обмена между станциями слежения НКУ-2 и ЦУПом может быть использована в том же составе, что и для НКУ-1.
ЦУП, взаимодействующий со средствами НКУ-2, тот же, что и в НКУ-1: ЦУП-М.
Исходя из вышеизложенного, в состав средств НКУ-2 планируется привлечь следующие средства на станциях слежения:
- в качестве основного средства, при обмене информацией с КА через ОНА – АС КТНА-200 (диаметр антенны 25 м, эффективная площадь 200 м2), доработанную для работы в S-диапазоне (облучатель, сопряжение с НРТК ЕКТС);
- в качестве резервного средства, при обмене информацией с КА через ВНА и телевизионных сеансов у Луны через ОНА – АС П-2500 (диаметр антенны 70 м, эффективная площадь 2200-2300 м2), доработанную для работы в S-диапазоне;
- два отдельных комплекта НРТК ЕКТС на базе станции «Клен» (для КТНА-200 и П-2500).
Отдельные комплекты НРТК необходимы для исключения недопустимых потерь в трактах передачи данных из-за значительного удаления этих антенн друг от друга (не менее 800 м, с учетом тракта по конструкции).
- АС П-200 (типа КТНА-200), доработанную для работы в S-диапазоне и состыкованную с НРТК ЕКТС;
- комплект НРТК ЕКТС.
• на станции слежения «Медвежьи озера» (Щелково)
- в качестве основного средства, при обмене информацией с КА через ОНА -АС ТНА-57 (диаметр антенны 12 м, эффективная площадь ~ 50 м2), доработанную для работы в S-диапазоне;
- в качестве резервного средства, при обмене информацией с КА через ВНА и телевизионных сеансов у Луны через ОНА – АС ТНА-1500 (диаметр антенны 64 м, эффективная площадь 1500 м2), доработанную для работы в S-диапазоне;
- два отдельных комплекта НРТК ЕКТС (для ТНА-57 и ТНА-1500).
Зоны видимости по трассе облета для «Медвежьих озер» и ОКИК-15, 13 приведены в таблицах 1.14.1-3. Из этих данных следует, что ОКИК-13 может быть рассмотрен как резервный по отношению к ОКИК-15 и «Медвежьим озерам», семиградусные зоны видимости которых практически перекрываются.
Таблица 1.14.1. НИП «Медвежьи озера» (560 с.ш., 380 в.д.)


Энергетические возможности средств НКУ-2
Дальности приема (обмена) информации в НКУ-2 при различной информативности борта и использовании АС, приведенных в разделе 1.14.4.1, даны в таблице 1.14.4.
При этом в качестве исходных данных по расчету энергетики радиолинии «КА-Земля» принимались:
- по БРТК «Союз-Л» обмен данными в формате ЕКТС, в S-диапазоне (2,2/2,3 ГГц); мощность бортового передатчика 30 Вт; коэффициент усиления антенн: Кувна=0,1 Дб, Куона=26 Дб (диаметр ОНА 1,2 м, диаграмма направленности ±40);
- суммарные потери в радиолинии – 10 Дб (в трактах АФУ, в атмосфере, из-за неточности наведения, при выделении и обработке сигнала).
Таблица 1.14.4. Дальность приема (обмена) информацией радиолинии «КА-Земля» для станций на территории РФ, при энергетическом запасе радиолинии 10 Дб.
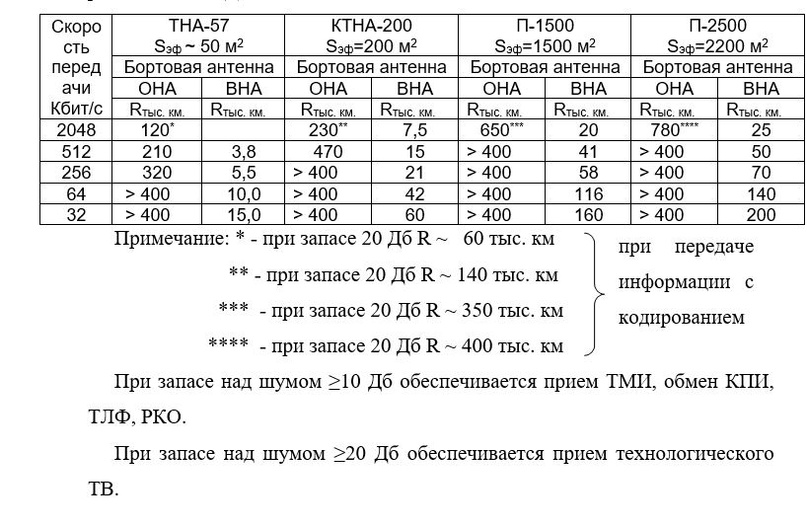
Из данных, приведенных в таблице 1.14.4, следует:
• АС-ТНА-57 при использовании ОНА корабля обеспечивает обмен информацией с кораблем «Союз-Л» на дальностях у Луны при скорости передачи данных до 256Кбит/с. Получение ТВ-информации с корабля на эту антенну возможно до дальности ~ 60 тыс. км;
• АС КТНА-200 при использовании ОНА корабля обеспечивает обмен информацией с кораблем «Союз-Л» на дальностях у Луны при скорости передачи до 512Кбит/с. При этом, обеспечивается прием телеметрической информации в полном объеме, обмен голосовыми сообщениями, передача командно-программной информации с квитированием и измерение текущих навигационных параметров. Получение ТВ-информации с борта «Союза-Л» (2048Кбит/с) через эту антенну обеспечивается до дальности ~ 140 тыс. км от поверхности Земли;
• для передачи ТВ-информации непосредственно при облете Луны, на дальности до 350-400 тыс. км, необходимо привлечение больших антенн на ОКИК-15 (П-2500) и на «Медвежьих озерах» (ТНА-1500);
• при обмене информацией с Землей через ВНА корабля, максимальная дальность приема данных, со скоростью передачи до 32 Кбит/с и использовании даже больших антенн на ОКИК-15 и на «Медвежьих озерах», составляет не более ~ 160-200 тыс. км от поверхности Земли (при запасе радиолинии 10 Дб и передаче информации с кодированием).
1.14.4.3 Особенности привлечения средств НКУ-2
При привлечении к обмену информацией при облете Луны АС и НРТК ЕКТС на ОКИК-13, 15 и на «Медвежьих озерах» необходимо иметь в виду:
- для АС КТНА-200 и ТНА-57 требуется освидетельствование состояния, выпуск документации по ремонтно-восстановительным работам (РВР) и собственно РВР, а также доработки для работы в S-диапазоне в стандарте ЕКТС. Достаточно полное техническое обслуживание АС КТНА-200 проводилось на ОКИК-13 в 1999 г., на ОКИК-15 – в 1997-1999 гг.; на станции «Медвежьи озера» техническое обслуживание ТНА-57 проведено в 2000 г.;
- РВР по антеннам П-2500 и ТНА-1500 проводятся и будут продолжены в 2007-2008 гг. для обеспечения работ по программам «Фобос-Грунт» и «Спектр-М». Стоимость их РВР в облетной программе может не учитываться. Но для обеих этих антенн требуются доработки для работы в S-диапазоне и стандарте ЕКТС.
При необходимом уровне финансирования работ, на РВР по антеннам КТНА-200 и ТНА-57, на доработки по всем АС и сопряжение с НРТК ЕКТС (с учетом изготовления и доставки НРТК) потребуется не менее 24-36 месяцев.
Необходимость привлечения в состав НКУ-2 средств вне территории РФ
Задействование упомянутых средств НКУ-2 только на территории РФ обеспечивает на облетной траектории каждые сутки полета возможность обмена данными с КА (зону связи) в течение 14-16 часов. 8-10 часов каждые сутки зона связи со станциями слежения НКУ-2 только на территории РФ отсутствует.
Факт такой «скважности» связи отражен на рис.1.14.2 и в таблицах 1.14.1-3.
Следует особо отметить, что при возврате к Земле с дальности ~ 100 тыс. км (~ 140 час полета от старта к Луне) в течение ~ 8 час до разделения отсеков корабля (~ 147,7 час полета) зона связи со станциями слежения НКУ-2 на территории РФ отсутствует. Этот факт виден в таблице 1.14.1 и на рис.1.14.2.
Отмеченная «скважность» связи на облетной траектории для станций слежения РФ и, особенно, отсутствие связи на подлетном участке при возвращении к Земле - заставляет рассмотреть привлечение к контролю и управлению полетом дополнительных станций слежения вне территории РФ.
Предварительный анализ показывает целесообразность использования дополнительной станции слежения в районе стартового полигона Куру во французской Гвиане (координаты 5,30 с.ш., 54,20 з.д.), а также транспортировки нашего мобильного измерительного пункта (МИП) в район Чили (предварительные координаты 330 ю.ш., 730 з.д.).

Дальность приема (обмена) информации при различной информативности БРТК корабля «Союз-Л» и использовании АС в Куру (предварительно диаметром 12 м при эффективной площади ~ 50 м2) и МИП, при энергетическом запасе 10 Дб даны в таблице 1.14.5.

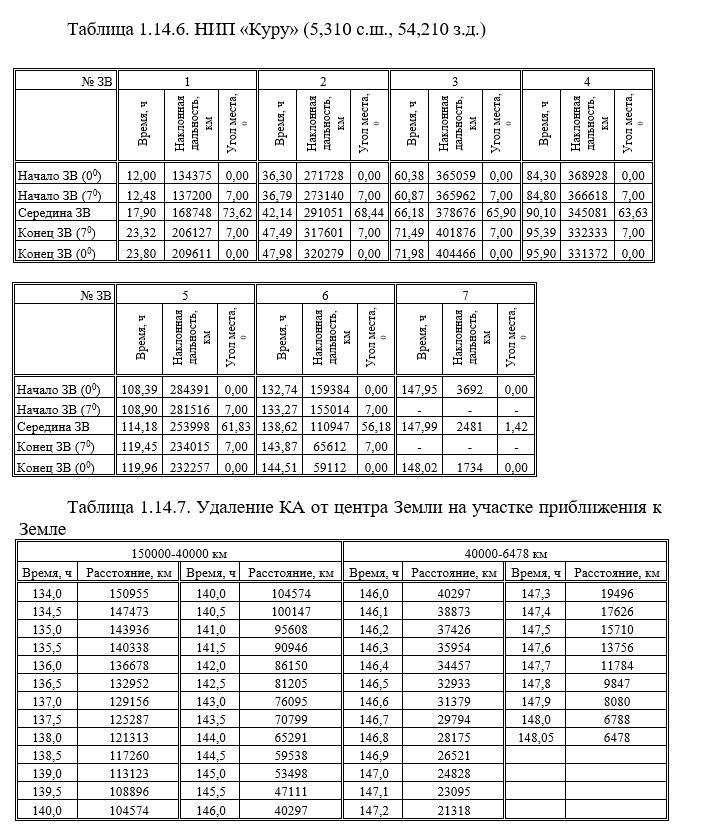
Зона связи со станцией слежения «Куру» приведена в таблице 6, а условия видимости КА при дополнительном привлечении этой станции на рис.1.14.3.
Из таблицы 1.14.6 и рис.1.14.3 следует, что при привлечении станции слежения в Куру зона отсутствия связи на облетной траектории каждые сутки полета уменьшается до 0,8-1,6 часа (8-10 часов без привлечения Куру). При этом обеспечивается прием информации с КА у Луны при скорости 64-256 Кбит/с.
Привлечение МИП в районе Чили, при работе через ОНА корабля «Союз-Л», позволяет осуществить связь с экипажем КА на участке подлета к Земле и получить сокращенный объем ТМИ (с общей информативностью канала связи до 64 Кбит/с) с дальности ~ 140 тыс. км, начиная с ~ 135 час полета, т.е. ~ за 12,5 час до разделения отсеков корабля (147,7 час полета). В таблице 1.14.7 приведено удаление КА от центра Земли на участке подлета.
Проблематичным и подлежащим дальнейшей проработке является вопрос получения ТМИ и голосовой связи с экипажем из СА после разделения отсеков корабля. На этом участке полета продолжительностью ~ 1 час, включая первое погружение в атмосферу, внеатмосферный участок полета СА и второе погружение в атмосферу (вплоть до выхода из плазмы на участке приземления), рассматриваемая возможность использования связи через СР «Инмарсат» не обеспечивает связь через плазму и требуемую информативность для передачи ТМИ и голосовую связь на внеатмосферном участке полета до второго погружения.
После второго погружения в атмосферу и выхода из плазмы голосовая связь с экипажем осуществляется через систему «Рассвет» и станции слежения из состава НКУ-1.
Схема НКУ-2 на этапах облета Луны и возвращения на Землю приведена на рис.1.14.4.
Кроме привлечения дополнительных станций слежения, в интервале высот от поверхности Земли ~ 20–5,5 тыс. км (до высоты разделения отсеков корабля), в течение ~ 1 часа полета может быть рассмотрена возможность связи с КА при работе ОНА и ЕКТС через спутники связи системы TDRSS.
Данные таблиц 1.14.1, 1.14.2, 1.14.3, 1.14.6 и 1.14.7 и рис.1.14.2, 1.14.3 приведены по информации отдела 012. Эти расчеты выполнены для одной из дат старта для варианта трассы отлета «север-юг» и стыковки «Союза-Л» с РБ после старта с МКС (сборка на высоте ~ 400 км). При образовании ЛЭК-1 при старте «Союза-Л» с Земли (сборка на высоте ~ 350 км) и других вариантов трассы - приведенные выше «скважности» связи на облетной траектории и при возврате к Земле, в основном, сохраняются. Уточнению (по зонам видимости) подлежит участок разгона ЛЭК-1 к Луне.


Предварительная оценка затрат и технико-экономическое обоснование привлечения средств НКУ
По средствам НКУ-1 (рис.1.7.1), привлекаемым для контроля и управления полетом корабля «Союз-Л», РБ ДМ-Л, образования ЛЭК-1 и разгона ЛЭК-1 к Луне, текущие РВР проводятся в рамках обеспечения полета РС МКС. Дооборудование станций слежения НРТК ЕКТС (станции «Клен») осуществляется в рамках развития гражданской составляющей ГосНАКУ. Эти затраты в затратах на облетную программу предлагается не учитывать.
При дальнейшем проектировании должен быть рассмотрен вопрос о включении или не включении в затраты по облетной программе (в зависимости от сроков ее реализации) затрат на дооборудование средств НКУ РКК «Энергия»: ПКУ «Наука-254» и ПКУ «Наука-Э». Эти затраты, по предварительным оценкам, для одного ПКУ составляют:
- дооборудование ПКУ полноповоротной антенной диаметром 5-7 м, ~ 400-500 тыс.$;
- дооборудование ПКУ НРТК ЕКТС ~ 650-750 тыс.$.
При дооборудовании эти ПКУ могут быть использованы вместо станций «Клен» на «Медвежьих озерах» и пл. 23 космодрома Байконур.
Затраты по средствам НКУ-1 на облетную программу составляют стандартные эксплуатационные расходы на подготовку средств НКУ-1 и собственно полетные затраты на использование средств и обмен информацией между станциями слежения НКУ-1 и ЦУПом.
Эксплуатационные расходы на привлечение средств НКУ-1 составляют ~ 400-600 тыс.руб. в сутки (в зависимости от сложности сеансов связи). Эта оценка сделана на базе анализа существующих договоров Роскосмоса с космическими войсками на эксплуатацию средств НКУ по обслуживанию объектов РС МКС. Годовая стоимость привлечения средств НКУ к управлению полетом РС МКС составила в 2005 г. ~ 178 млн.руб.
Таким образом, суммарные эксплуатационные расходы на привлечение средств НКУ-1 (кроме затрат на ПКУ) исходя из проведения:
- двух отработочных беспилотных облетов Луны и одного пилотируемого полета на корабле «Союз-Л» с продолжительностью участка, где используются средства НКУ-1, до 2-х суток в каждом полете;
- десятидневных комплексных тренировок средств НКУ-1 перед каждым полетом;
за 36 суток использования средств НКУ-1 составляют ~ 18 млн. руб. (0,67 млн.$ при курсе рубля к доллару США в середине 2006 г.).
В этих расходах не учитываются затраты на аренду возможно привлекаемых средств спутниковых систем связи (TDRSS или «Артемис») или затраты на привлечение отечественной ССКУ на базе СР «Луч-5». Ориентировочные затраты на аренду системы TDRSS составляют 40 тыс.$/час (оценка сделана по опыту использования TDRSS в программе «Морской старт»).
По привлекаемым к облетной программе большим антеннам на ОКИК-15 и «Медвежьих озерах» (П-2500 и ТНА-1500) освидетельствование и РВР проводятся и будут продолжены в 2007-2008 гг. для обеспечения работ по программам «Фобос-Грунт», «Спектр-М» и полету индийского КА. Эти затраты в облетной программе могут не учитываться. Кроме того, на антенне ТНА-1500 обеспечивается работа в S-диапазоне.
Исходя из вышесказанного по средствам НКУ-2 (рис. 1.15.2) необходимо учитывать затраты на проведение:
- оценки состояния и освидетельствования антенных систем КТНА-200 (П-200) на ОКИК-15 и13 и ТНА-57 на станции слежения «Медвежьи озера»;
- выпуска комплекта ремонтной документации на АС и САУ АС КТНА-200 (П-200) и ТНА-57;
- проведение ремонтных работ на АС и САУ АС этих антенных систем;
- доработки АС КТНА-200 (П-200), ТНА-57 и П-2500 для обеспечения работ в S-диапазоне (включая изготовление и монтаж новых облучателей);
- изготовление и поставку абонентам 6 комплектов НРТК ЕКТС (по два комплекта на ОКИК-15 и станцию слежения «Медвежьи озера», по одному комплекту на ОКИК-13 и МИП);
- монтаж и отработку НРТК ЕКТС совместно с привлекаемыми АС на станциях слежения и на МИП;
- транспортировку МИП в точку базирования (Чили);
- затраты на аренду (и возможное дооснащение) привлекаемых средств S-диапазона на космодроме «Куру»;
- дооснащение средств ЦУП-М, разработку и модернизацию ПМО ЦУП;
- комплексные испытания всех привлекаемых средств НКУ-2;
- эксплуатационные расходы на средства НКУ-2 для подготовки и обеспечения проведения двух беспилотных и одного пилотируемого облета Луны.
Предварительная оценка величины требуемых затрат на НКУ-2 для проведения первого пилотируемого облета Луны (без учета собственных затрат РКК «Энергия») приведена в таблице 1.14.8.
Оценка затрат выполнена на основании предварительных данных, полученных в рабочем порядке из КБСМ, РНИИ КП и ЦУП-М

Общие затраты на НКУ
Таким образом, предварительные суммарные затраты на подготовку и целевое применение средств НКУ в целом в облетной программе, в том числе по НКУ-1 (~ 18 млн. руб.) и НКУ-2 (232 - 265 млн. руб.), без учета собственных работ РКК «Энергия», затрат на аренду и возможное дооснащение средств станции слежения в Куру, привлечения ССКУ и возможных затрат на дооснащение ПКУ, составляют ~ 250-283 млн. руб. (~ 9,3-10,5 млн. $ при курсе рубля к доллару в середине 2006 г.).
~ 7% составляют затраты на привлечение средств НКУ-1 (эксплуатационные расходы, без учета затрат на аренду ССКУ);
~ 48% составляют затраты на изготовление шести комплектов НРТК ЕКТС и дооборудование ими всех предлагаемых средств на станциях слежения НКУ-2 и МИП;
~ 13,5% составляют затраты на привлечение резервного ОКИК-13 в НКУ-2;
~ 17% составляют затраты на дооборудование и привлечение больших антенн на станциях слежения «Медвежьи озера» (ТНА-1500) и ОКИК-15 (П-2500);
~ 11,5% составляют затраты на привлечение МИП (включая транспортировку в Чили морским транспортом);
~ 3,5% эксплуатационные расходы на НКУ-2 (без учета затрат на аренду средств станций слежения в Куру).
В приведенных выше предварительных суммарных затратах по НКУ не учитываются затраты на дооборудование ОКИК станциями «Клен», осуществляемое по программе развития гражданской составляющей ГосНАКУ. Предварительная стоимость одной станции «Клен» составляет ~ 30 млн. руб. (антенная система Æ7 м и НРТК ЕКТС).
При дальнейшем проектировании должны быть уточнены затраты на:
- аренду и возможное дооснащение средств на станции слежения в Куру;
- аренду привлекаемых средств ССКУ (предварительно для TDRSS ~ 40 тыс. $/час);
- дооснащение ПКУ из состава НКУ РКК «Энергия» (предварительно для дооснащения ПКУ «Наука-Э» и ПКУ «Наука-254» - 2,2 млн. $.).
Контроль и управление полетом
Управление полетом объектов лунного облетного комплекса осуществляется при взаимодействии бортового комплекса управления (БКУ) корабля «Союз-Л» и разгонного блока РБ «ДМ-Л» и наземного комплекса управления (НКУ).
Состав и особенности БКУ корабля «Союз-Л» изложены в разделах 2.3 и 2.4 Книги 2 Технических предложений. Состав и особенности БКУ РБ «ДМ-Л» изложены в разделе 3.10 Книги 3 Технических предложений. Взаимодействие БКУ корабля и РБ изложено в разделе 1.9 данной Книги и разделе 2.8 Книги 2 Технических предложений.
На участке полета по ОИСЗ, включая создание ЛЭК-1, управление полетом корабля и РБ осуществляется в сеансах связи путем взаимодействия ЦУПа (ЦУП-М) через станции слежения НКУ-1. Состав БРТК на корабле и РБ и состав средств на станциях слежения НКУ-1 приведены в разделе 1.15.1.
В этот период полета (продолжительностью ~ 1,5 суток или 19-24 витка, до старта ЛЭК-1 к Луне) проводятся сеансы связи с КА и РБ, включая решение следующих основных задач:
- контроля состояния КА и РБ (в первую очередь – после выведения КА и РБ);
- контроль коррекции орбиты РБ для перехода на сборочную орбиту;
- расчет и закладку КПИ для коррекции орбиты КА;
- контроль коррекции орбиты КА;
- тестовые проверки связи через БРТК ЕКТС с использованием средств НКУ-2 и, возможно, ПКУ РКК «Энергия»;
- контроль операции сближения и стыковки КА с РБ;
- контроль состояния КА и РБ после образования ЛЭК-1 и готовности к старту к Луне.
Продолжительность сеансов связи через средства НКУ-1 при полете по ОИСЗ (с 13 по 5 суточные витки) – 6-20 минут. На суточных витках с 6 по 12 (т.е. в течение ~ 10,5 часов) связь через станции слежения НКУ-1 отсутствует.
При необходимости контроля динамических операций в реальном масштабе времени, вне зон связи через средства НКУ-1, должен быть рассмотрен вариант связи с КА через БРТК ЕКТС с использованием СР системы TDRSS (с ~ 2009-2010 гг. – возможно использование СР «Луч-5»).
После стыковки КА с РБ и образования ЛЭК-1, в течение 1-2 витков должны проводиться тесты всех систем КА и РБ для подтверждения готовности к старту к Луне. В нештатных ситуациях в СУ РБ должна быть предусмотрена возможность по радиокомандам с Земли (со средств НКУ-1 или НКУ-2) выполнение операций:
- запрета включения РБ для старта к Луне;
- изменения времени и параметров разгонного импульса при старте к Луне (смена полетного задания);
- нештатного отделения РБ от КА.
Баллистическая схема разгона к Луне возможна в диапазоне шести вариантов отлетных трасс, приведенных (для справки) на рис.1.14.5-10. Для каждой из шести приведенных на этих рисунках «типовых» трасс, при изменении дат старта, расположение активного участка работы РБ смещается по долготе, с примерным сохранением его размещения по широте.
С учетом этой особенности, из приведенных рисунков 1.14.5-10 следует, что для трасс «север-юг» при склонениях Луны, близких к минимальному и нулевому (рис.1.14.5, 1.14.6) существует возможность выбора дат старта с обеспечением частичного контроля участка работы РБ с российских станций слежения (из состава НКУ-1 и НКУ-2). Для трассы «север-юг» со склонением Луны, близком к максимальному (рис.1.14.7) и для всех трасс «юг-юг» (рис.1.14.8, 1.14.9 и 1.14.10) – возможность контроля работы РБ в реальном масштабе времени с российских станций слежения отсутствует.
На участке старта к Луне по варианту трассы «север-юг» при минимальном склонении Луны (рис.1.14.5) (дальности до ЛЭК-1 <3000 км) контроль работы РБ и его отделение осуществляется при взаимодействии ЦУПа с кораблем и РБ в сеансах связи через средства НКУ-1.
При этом, для этого варианта трассы и образования ЛЭК-1 при старте корабля с МКС (сборка ЛЭК-1 на высоте ~ 400 км), включение РБ проходит вне зон станций слежения НКУ-1. Со станций слежения НКУ-1 контролируются последние ~ 3 мин работы РБ (из ~ 12,5 мин работы) и отделение РБ.
Для оценки в реальном масштабе времени ориентации ЛЭК-1 перед включением РБ и контроля начального участка работы ДУ РБ необходимо получение ТМИ корабля и РБ через ССКУ: систему TDRSS или «Артемис» (~ с 2009 г. через СР «Луч-5»).
С использованием средств НКУ-1 (НКУ-2) должно осуществляться также взаимодействие с РБ в нештатных ситуациях, при необходимости запрета включения ДУ РБ или изменения заложенного полетного задания.
При образовании ЛЭК-1 при старте «Союза-Л» с Земли (сборка на высоте ~ 350 км) и других вариантов трассы отлета зона контроля РБ и его отделения подлежит уточнению при дальнейшем проектировании.
При отсутствии возможности привлечения ССКУ для получения ТМИ по активному участку работы РБ - при дальнейшем проектировании должен быть рассмотрен вопрос о допустимости отсутствия телеметрического контроля работы РБ при разгоне к Луне, т.е. являются ли условия контроля работы РБ с Земли в реальном масштабе времени дополнительными ограничениями для выбора дат и времен старта.
Полет по облетной траектории и возврат к Земле
На участке облета Луны и возвращении на Землю управление полетом осуществляется при взаимодействии ЦУПа с кораблем «Союз-Л» в сеансах связи через средства НКУ-2. Состав БРТК на корабле и РБ и состав средств на станциях слежения НКУ-2 приведены в разделе 1.14.1.
В этот период полета (продолжительностью ~ 6 суток) проводятся сеансы связи с КА для решения следующих основных задач:
- контроль траектории полета КА;
- контроль состояния систем КА и экипажа КА (в пилотируемом полете);
- расчет и закладка КПИ для проведения коррекций траектории облета Луны и возвращения на Землю;
- контроль коррекций траектории (возможны 2-3 коррекции на подлете к Луне и 2-3 коррекции при возвращении на Землю);
- телевизионные передачи с КА и связь с экипажем;
- тестовые проверки «спусковых» систем КА.
Задействование станций слежения только на территории РФ (в НКУ-2 трех станций слежения: на Медвежьих озерах, в Улан-Удэ и Уссурийске), позволяет в каждые из 6 суток при облете и возвращении иметь связь с кораблем в течение ~ 15 часов, при отсутствии связи в течение ~ 9 часов. Трасса полета в варианте «север-юг» при склонении Луны, близком к минимальному, и зоны видимости на территории РФ при полете «Союза-Л» по облетной траектории приведены на рис.1.14.11.
Для расширения зоны связи следует рассмотреть возможность организации дополнительной станции слежения, предварительно располагаемой в Южной Америке во Французской Гвиане, на стартовом полигоне Куру.
При использовании средств дополнительной станции слежения в Куру, работающей в S-диапазоне, может быть достигнуто значительное расширение зон связи с кораблем: до 22-23 часов в каждые сутки облета продолжительностью (в случае наличия в Куру и возможности привлечения антенны диаметром ~ 12-20 м, что подлежит рассмотрению при дальнейшем проектировании).
При обмене информацией с кораблем через ОНА основные средства НКУ-2 обеспечивают информативность обмена полетными данными не менее 256-512 КБ/с на дальностях у Луны. Использование больших антенн на ОКИК-15 и в «Медвежьих озерах» позволяет обеспечить передачу технологического ТВ (информативность 2048 КБ/с) в сеансах связи с кораблем у Луны.
Ожидаемая информативность обмена данными с привлекаемой дополнительной станцией слежения в Куру – 64-256 КБ/с.
Трасса полета и зоны видимости российских средств НКУ-2 совместно со станцией слежения в Куру при полете «Союза-Л» по облетной траектории приведены на рис.1.14.12.
Отдельно необходимо рассмотреть проблему контроля и управления на участке возвращения к Земле, ~ с 135 часа полета.
Как следует из рис.1.14.12, при использовании только средств НКУ-2 на территории РФ и станции слежения в Куру, на участке возвращения ~ с 140 часа полета (~ 9 часов до посадки, при удалении от Земли ~ 100 тыс. км) возможность связи с кораблем отсутствует. Вне зоны видимости этих станций слежения НКУ-2 находится вся траектория подлета к Земле, от удаления ~ 100 тыс. км вплоть до разделения отсеков перед первым погружением в атмосферу. Такое информационное обеспечение участка возвращения представляется неприемлемым.
Для расширения возможности связи с кораблем на этом участке полета предлагается размещение в Южной Америке мобильного измерительного пункта (МИП) РКК «Энергия», дооборудованного НРТК ЕКТС. Предварительный возможный район размещения МИП – Чили (район Сантьяго). Ввиду ограничений на МИП по дальности приема данных необходимо предусмотреть ~ с 135 часа полета корабля переход на малоинформативную телеметрию (~ 32Кбит/с).
В этом случае прием ТМИ и голосовая связь с экипажем корабля (при общей информативности канала 64Кбит/с) может быть обеспечена с дальности ~ 140 тыс. км (~ 12,5 часов до разделения) и может быть обеспечен контроль разделения отсеков корабля (~ 20 мин до первого входа в атмосферу, высота от поверхности Земли ~ 5000 км, дальность до МИП ~ 7-11 тыс. км).
При дальнейшем проектировании должна быть рассмотрена также возможность привлечения станции слежения в Куру и МИП, при его расположении в Чили, для контроля работы РБ при разгоне к Луне в варианте трасс «север-юг» при склонении Луны, близком к максимальному, трасс «юг-юг» и выборе соответствующих дат старта.
Проблемным и подлежащим проработке при дальнейшем проектировании является вопрос получения ТМИ (хотя бы сокращенного потока) и голосовой связи с экипажем после разделения отсеков корабля (продолжительность ~ 1 час), включая участок полета СА при первом погружении в атмосферу, внеатмосферный полет и участок второго погружения, вплоть до выхода из плазмы после второго погружения.
После второго погружения в атмосферу и выхода из плазмы голосовая связь с экипажем осуществляется через систему «Рассвет» и станции слежения из состава НКУ-1.
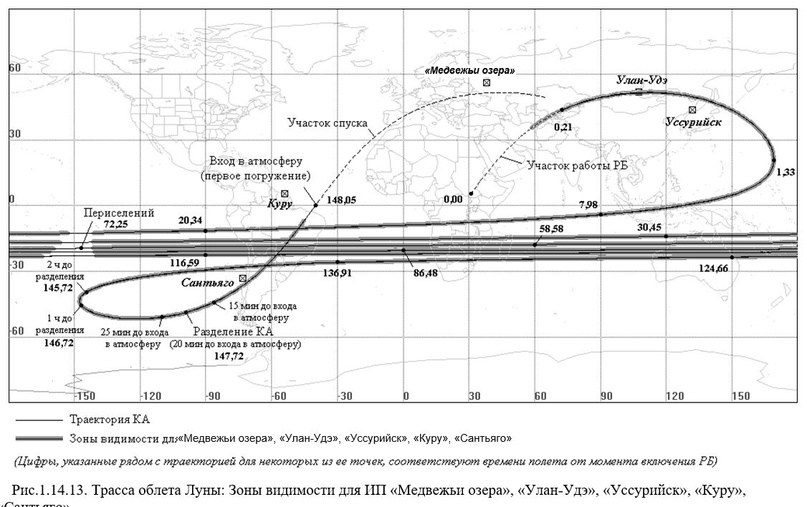
Трасса полета и зоны видимости с Земли при использовании российских средств НКУ-2, дополнительной станции слежения в Куру и МИПа в Чили, приведены на рис.1.14.13 и 1.14.14.
Информация на рис. 1.14.5-14 приведена по данным 012 отдела. Данные на рисунках 1.14.11-14 приведены для варианта трассы «север-юг» при склонении Луны, близком к минимальному и для варианта стыковки «Союза-Л» с РБ после старта корабля с МКС, для одной из возможных дат старта. Для других вариантов трасс и дат старта, при сохранении отмеченной «скважности» зон связи, может сдвигаться по трассе полета точка Периселения, а также изменяться форма «петли» трассы при возврате к Земле. При этом целесообразность размещения дополнительной станции слежения в Куру и размещения МИП в Чили – сохраняется.









Выводы
Для обеспечения контроля и управления объектами ЛЭК-1 при полете по ОИСЗ необходимо привлечение четырех основных станций слежения из состава используемых в НКУ РС МКС, дооборудованных станциями НРТК ЕКТС «Клен» (г. Щелково или «Медвежьи озера», пл. 23 космодрома Байконур, г. Улан-Удэ, г. Уссурийск).
Привлечение этих станций слежения обеспечивает связь корабля «Союз-Л» и РБ-ДМ-Л с Землей на девяти из 16 суточных витков.
Для расширения возможности связи с кораблем и РБ на ОИСЗ и, особенно, для контроля работы РБ при старте к Луне, должна привлекаться ССКУ, т.е. организация связи с кораблем и РБ через СР систем TDRSS, «Артемис» (с 2009-2010 г.г., возможно, через СР «Луч-5»).
Для обеспечения контроля и управления полетом корабля «Союз-Л» по облетной траектории необходимо привлечение двух основных станций слежения (г. Уссурийск и «Медвежьи озера») и одной резервной (г. Улан-Удэ), с использованием на этих станциях слежения больших антенных систем (Æ25-70 м), дооборудованных для работы в S-диапазоне и НРТК ЕКТС.
Использование этих средств на станциях слежения позволит иметь связь с кораблем в течение ~15 часов в каждые из 6 облетных суток. При этом при работе через ОНА корабля обеспечивается обмен информацией между бортом и Землей при информативности до 256-512 КБ/с. и передачи технологического ТВ с корабля (информативность 2048 КБ/с) на дальностях у Луны.
Для увеличения возможной продолжительности связи с кораблем на облетной траектории до 22-23 часов в каждые сутки, как это было реализовано в программе Л1, необходимо привлечение дополнительной станции слежения вне территории РФ. В качестве такой станции предлагается использовать средства, работающие в S-диапазоне на стартовом полигоне Куру во Французской Гвиане.
Для контроля и управления полетом корабля на заключительном участке облетной траектории при возврате к Земле (не видимом со средств НКУ и из Куру) предлагается использовать мобильный измерительный пункт (МИП) РКК «Энергия», дооснащенный НРТК ЕКТС. Предлагаемое место размещения МИП – Чили, район г. Сантьяго.
Такое размещение МИП позволит, при информативности обмена с кораблем до 64 КБ/с, осуществить контроль и управление кораблем и связь с экипажем вплоть до разделения отсеков перед первым входом в атмосферу.
Проблемным и подлежащим дальнейшей проработке является вопрос контроля состояния СА корабля после разделения отсеков и связь с экипажем из СА, на участках полета при двух погружениях в атмосферу, вплоть до выхода из плазмы после второго погружения.
Предварительные затраты на привлечение и дооборудование средств НКУ для контроля и управления полетом при облете Луны составляют 250-283 млн. руб. При этом затраты на установку на ОКИК станций НРТК ЕКТС «Клен» для обмена информацией на ОИСЗ, осуществляемую по программе развития гражданской составляющей ГосНАКУ, предлагается в облетной программе не учитывать.
При дальнейшем проектировании должны быть уточнены дополнительные затраты на аренду и возможное дооснащение средств на станции слежения в Куру, на аренду средств ССКУ (TDRSS, «Артемис» или «Луч-5»), а также средств на дооснащение ПКУ из состава НКУ РКК «Энергия».
14. Дополнительные задачи и возможности ЛЭК-1 и ЛОК.
Кроме основной задачи по облету Луны, ЛЭК-1 и ЛОК можно будет использовать для решения следующих задач:

- выход на окололунную орбиту;
- смена экипажа лунной орбитальной станции;
- посадка экипажа на МЭК;
- обслуживание спутников на высоких орбитах.
ЛОК, можно будет использовать во второй экспедиции на Луну, программа которой будет предусматривать выход комплекса на окололунную орбиту. Учитывая то, что ЛОК будет выводиться в связке с РБ типа «Фрегат» то необходимо доработать конструкцию корабля в части адаптации для соединения с «Фрегатом».
Лунный экспедиционный комплекс для выхода на орбиту искусственного спутника Луны (ЛЭК-2) можно будет построить на базе ЛЭК-1. Однако, для перелета на окололунную орбиту и последующего старта с нее для возвращения к Земле необходима суммарная характеристическая скорость 5340 м/с (характеристическая скорость необходимая для облета Луны составляет 3180 м/с). Это потребует оснащения ЛЭК-2 еще одним РБ типа ДМ и РБ типа «Фрегат». Поэтому ЛЭК-2 будет состоять из ЛОК, двух РБ типа ДМ и РБ типа «Фрегат». Сборка комплекса будет происходить на низкой околоземной орбите. Выведение на орбиту РБ типа ДМ будет происходить с помощью РН «Протон-М», а выведение ЛОК в связке с РБ типа «Фрегат» с помощью РН «Союз-3» или «Зенит». Последовательность сборки ЛЭК-2 может быть следующей. Сначала на орбиту выводится ДМ с двумя пассивными агрегатами стыковки, установленными по оси Х в носовой и хвостовой части РБ. Затем на орбиту выводится ДМ с активным стыковочным агрегатом в носовой части и стыкуется «в хвост» первому ДМ. После этого на орбиту выводится связка ЛОК+ «Фрегат» и стыкуется к связке ДМ+ДМ. После сборки и проверки работоспособности бортовых систем ЛЭК-2 стартует к Луне. Во время облета Луны, в периселении, будет выдан тормозной импульс и комплекс станет искусственным спутником Луны.
После полета по орбите искусственного спутника Луны, в течении нескольких витков и проведения программы исследований, будет выдан разгонный импульс и ЛОК вернется к Земле. Схема возвращения ЛОК ничем не будет отличаться от схемы используемой в ЛЭК-1.
Возможны, также, следующие варианты построения комплекса:
При этом схема полета будет мало отличаться от схемы описанной ниже.

ЛОК целесообразно будет использовать для обеспечения функционирования лунной орбитальной станции (ЛОС), в части смены экипажа и обеспечения грузопотока. ЛОС будет необходима для исследования и освоения Луны. Лунная орбитальная станция будет находиться на орбите высотой 100 км от поверхности Луны.
На ней будет постоянно присутствовать экипаж из 3-х человек. Они будут проводить научные исследования, включая дистанционное зондирование Луны, подробное картографирование ее поверхности и т.д. Автоматические аппараты будут доставлять с поверхности Луны на станцию образцы грунта, лунные минералы, которые потом будут переправляться на Землю. Схема полета может быть следующей.
ЛЭК, состав которого аналогичен ЛЭК-2 (два РБ типа «ДМ», РБ «Фрегат» и ЛОК), собирается на низкой околоземной орбите и летит к Луне. Затем, после выдачи тормозного импульса, выходит на орбиту искусственного спутника Луны высотой 100 км и стыкуется с лунной станцией.
Новый экипаж переходит на станцию, а старый экипаж после сдачи дежурства переходит в свой ЛОК, предварительно погрузив туда образцы грунта и минералов. Затем ЛОК отстыковывается от станции и летит к Земле.
При возвращении на Землю спускаемого аппарата реализуется траектория с двукратным прохождением атмосферы. Экипаж лунной орбитальной станции, исходя из минимизации ущерба здоровью членов экипажа, будет целесообразно менять раз в полгода.

ЛЭК-1, возможно, будет целесообразно использовать для доставки экипажа на марсианский экспедиционный комплекс (МЭК). По основной концепции пилотируемой экспедиции на Марс, МЭК будет собираться на низкой околоземной орбите и, затем будет повышать орбиту по раскручивающейся спирали, пока не достигнет границы сферы действия Земли. Весь этот маневр будет занимать около полугода. При чем большую часть этого периода МЭК будет находиться в радиационных поясах Земли.
Исходя из требований безопасности экипажа, а также из необходимости сокращения времени пребывания экипажа в условиях невесомости, целесообразно будет доставить экипаж на МЭК после прохождения им радиационных поясов (высота орбиты 200000 км). Доставку экипажа можно будет осуществить с помощью ЛЭК-1.
Поскольку МЭК рассчитывается на экипаж 4-6 человек, а ЛЭК-1 будет рассчитан на экипаж 3 человека, то для доставки экипажа на МЭК потребуется два ЛЭК-1.
Схема доставки экипажа будет примерно такой. МЭК после прохождения радиационных поясов выходит на круговую орбиту, высотой 200000 км. В это время с низкой околоземной орбиты стартует ЛЭК.
После совершения двухимпульсного маневра (ΔV ~ 3000 м/с) РБ отделяется от ЛОК, а он выходит на орбиту МЭК и стыкуется с ним. Космонавты переходят в МЭК, после чего ЛОК отделяется и переводится на безопасную орбиту. Затем или параллельно с необходимым запаздыванием те же действия совершает второй ЛЭК.

Направления исследований и экспериментов и предлагаемая для их реализации научная аппаратура
- планетные и астрофизические исследования;
- исследования параметров плазмы по трассе полета к Луне;
- дистанционное зондирование Луны.
Предполагаемый состав научной аппаратуры:
Приборы для планетных и астрофизических исследований
- комплекс для исследований солнечного ветра;
- многоэлементный модуль детектирования рентгеновского излучения;
Приборы для исследования радиации и параметров плазмы по трассе полета к Луне
- система радиационного контроля;
- магнитометр;
- миниатюрный панорамный анализатор плазмы;
- диагностический комплекс ионосферной плазмы;
Дистанционное зондирование Луны
- СВЧ-радиометры;
- системы космической цифровой съемки;
Технические характеристики научной аппаратуры
Комплекс для исследований солнечного ветра
Назначение
Измерения межпланетного магнитного поля, параметров ионов солнечного ветра и энергичных ионов и электронов в межпланетном пространстве в целях:
- мониторинга межпланетной среды в интересах прогноза «космической погоды»;
- изучения вариаций и тонкой структуры параметров магнитного поля и частиц плазмы с высоким временным разрешением до 32 Гц.
- быстрый монитор солнечного ветра (БМСВ) в составе шести датчиков — цилиндров Фарадея, позволяющих одномоментно определять скорость, направление, плотность и температуру ионов солнечного ветра;
- детектор энергичных ионов (15–3200 кэВ) и электронов (15–320 кэВ) (ДЭИЭ) с большим геометрическим фактором;
- систему сбора и обработки данных (ССОД) 2 с памятью 200 Гбайт и возможностью гибкой обработки данных на борту КА.
Основные характеристики

Многоэлементный модуль детектирования рентгеновского излучения
Назначение — Детектирование и спектрометрия жесткого рентгеновского излучения многоэлементным модулем в составе позиционно-чувствительных приемников большой площади.
Описание — Модуль представляет собой гибридную интегральную схему, выполненную по толстопленочной технологии. На верхней стороне керамической подложки модуля расположены 32 CdZnTe-детектора, обеспечивающие высокую эффективность регистрации рентгеновского излучения и возможность работать при небольшом (до –30…–40) °С) захолаживании. Конструкция позволяет устанавливать необходимое количество модулей вплотную друг к другу для создания детектирующих плоскостей требуемой площади.
Размер детектора 4,0×4,0×2,5 мм
Общий размер модуля 37,6×18,8×20,0 мм
Энергетический диапазон 10–150 кэВ

Система радиационного контроля (отделение 15)
- измерения вектора постоянных и переменных магнитных полей в дальнем и ближнем космосе;
- мониторинг электромагнитной обстановки и магнитной чистоты космических экспериментов;
- проведение магнитовариационного зондирования поверхностных пород.
- трехкомпонентный феррозондовый датчик;
- индукционный датчик магнитного поля;
- процессор спектрально-корреляционного анализа;
- магнитометрическую лабораторную систему для оценки остаточной намагниченности космических аппаратов и систем (МСОН).
низкочастотного датчика 0–1000 Гц
высокочастотного датчика 10–106 Гц
Миниатюрные панорамные анализаторы плазмы
Назначение — Быстрые детальные измерения функций распределения ионов (с разделением по массе) и электронов в межпланетной среде, в магнитосфере Земли и окрестностях планет.
Измерение потоков ионов и электронов производится одномоментно в полупространстве скоростей на фиксированной энергии и при быстром (0,1–1,0 с) сканировании в полном диапазоне энергий. Прибор основан на новой методике анализа потоков заряженных частиц с использованием зеркальной электростатической оптики.
Масса (c одним анализатором) 0,6–1,2 кг

Диагностика окружающей среды космического аппарата по низкоэнергичным (< 10 эВ) заряженным частицам, глобальный мониторинг и комплексный детальный анализ ионосферной плазмы.
Наблюдения плазмы производятся локальными зондовыми методами при помощи 10 различных датчиков, объединенных конструктивно в один блок: модифицированные зонды Ленгмюра, ионные ловушки-анализаторы с тормозящим потенциалом, дрейфметр.
Измеряются потенциал корпуса корабля, концентрация и температура электронов и ионов, скорость и направление дрейфа плазмы относительно корабля, массовый состав ионов.
Прибор состоит из блока электроники (БЭ) и блока датчиков (БД).

Измерение радиояркостной температуры удаленных объектов при решении радиоастрономических задач и задач дистанционного зондирования Земли и планет.
Приборы представляет собой измерительные СВЧ-приемники. Для обеспечения необходимых метрологических качеств радиометры могут быть снабжены устройствами калибровки, термостатирования, а также вторичными источниками питания. Приборы выполнены с использованием современных корпусных и бескорпусных интегральных схем СВЧ.
Габариты (макс.) 300×200×100 мм
Диапазон рабочих частот 1,4; 21; 60 ГГц
Чувствительность 0,2; 0,01; 0,5 К

Система космической цифровой съемки
Изображения поверхности в трех спектральных зонах
Информация в каждом цифровом многозональном съемочном устройстве (МСУ) среднего разрешения регистрируется на трех ПЗС-линейках, оснащаемых разными светофильтрами. Первичная обработка видеоданных осуществляется в цифровом сигнальном процессоре. Для перспективного комплекса цифровой съемки разрабатываются камеры
МСУ-100М и МСУ-200, работающие в видимом и ближнем инфракрасном диапазонах.


15. Заключение
- Предварительные проработки показали, что транспортный пилотируемый корабль “Союз” доработками может быть использован для решения задачи пилотируемого облета Луны. Для этой цели необходимо провести следующие доработки:
- В качестве разгонного блока, обеспечивающего выведение корабля на лунную траекторию, может быть использован разгонный блок ДМ. Необходимые доработки включают:
- Выведение элементов лунного комплекса осуществляется по двухпусковой схеме: разгонный блок ДМ выводится на РН «Протон-М», пилотируемый корабль – на РН «Союз-ФГ», с последующей сборкой на низкой околоземной орбите.
- Доработки пилотируемого корабля и разгонного блока по взаимному сопряжению принципиально осуществимы и могут быть проведены на базе использования существующего и перспективного заделов.
- Существующая научно–исследовательская, техническая, конструкторско–технологическая, экспериментальная и производственная база для разработки, изготовления и испытаний пилотируемого корабля и разгонного блока позволяет осуществить проект облета Луны при наличии требуемого финансирования.